Vimos anteriormente uma quantidade conservada.
Vamos agora ver outra, desta vez para um sistema isolado.
Momento Linear
Definimos o momento linear como:
P=mv
A lei de Newton diz que
F=∂t∂P⟺F=ma,se m=const
recuperando assim a lei de Newton a que estamos habituados.
Sistemas Isolados
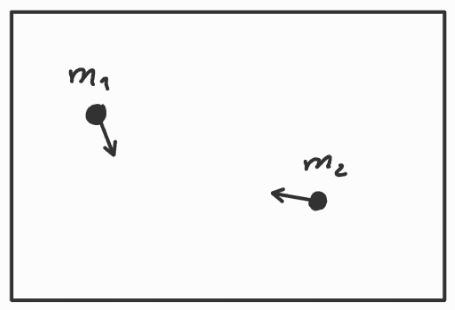
Olhemos agora para um sistema isolado do exterior:
Como o sistema está isolado, a força que m2 aplica a m1 é acompanhada por uma força simétrica de m1 sobre m2, isto é
∑Fi=F12+F21=0(3ª lei de Newton)
ou seja
∂t∂[m1v1+m2v2]=0⟹PT=const
Quando consideramos um objeto a cair na Terra geralmente vemos que o seu momento não se conserva porque não estamos a considerar a Terra no nosso sistema, do qual a Terra teria de fazer parte para para o momento do sistema se conservar.
Colisões
Colisões (Totalmente) Inelásticas
Uma colisão inelástica é aquela em que há perda de
energia cinética do sistema. Quando ocorre uma perda máxima de energia cinética,
isto é, quando ambos os corpos ficam com a mesma velocidade, dá-se o nome de
colisão totalmente inelástica.
Exemplo
Numa colisão totalmente inelástica, a velocidade final das duas massas é igual.
Além disso, como estamos perante um sistema isolado, o momento linear, P, também
se conserva. Considerando que ambas as esferas têm igual massa (i.e. m1=m2)
e que a esfera 2 está em repouso inicialmente, temos,
Uma colisão elástica é aquela em que há conservação de
energia cinética do sistema.
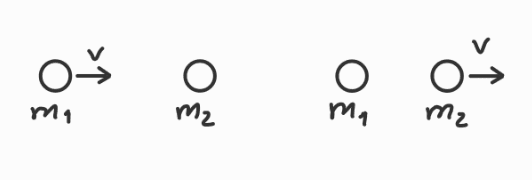
Exemplo
Consideremos uma colisão elástica entre duas bolas de bilhar uma
com velocidade inicial vi e outra parada.
Observa-se uma colisão frontal que, como é elástica, conserva a energia cinética.
Sabemos que P é constante e a energia cinética é conservada, logo
{mvi=mv1+mv221mvi2=21mv12+21mv22⟺{vi=v1+v2vi2=v12+v22⟹v1=0As esferas colidemv2=vi∨v2=0Na˜o existe colisa˜ov1=vi
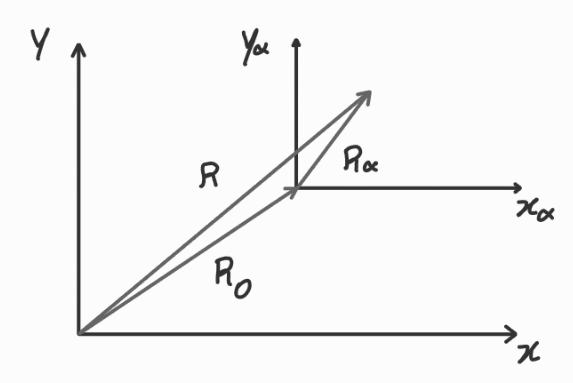
Colisão Elástica (Geral)
Para uma colisão elástica em que os corpos têm massa diferente
Ao escolher o referencial com o centro no centro de massa temos que ∑miv∗i=0.
Em relação a este sistema o objeto, composto por várias partículas, move-se como um único ponto: